| Видеодетектор транспорта РТК
Предназначен для обнаружения транспортных средств на перекрестке и определения их параметров. |
 |
Функции
- обнаружение транспортных средств (далее «ТС») в заданных оператором зонах перекрестка;
- различение классов ТС;
- определения скорости ТС;
- сбор и хранение статистики транспортного потока;
- отображение статистики в виде графиков в веб интерфейсе детектора;
- предоставление статистики пользователю в виде файлов csv;
- визуализация обнаружений на видеоизображении перекрестка в реальном масштабе времени;
- предоставление результатов работы по интерфейсу Ethernet; возможна реализация протокола пользователя;
- ведение и предоставление пользователю журналов телеметрии и ошибок;
- вывод результатов детектирования на сухие контакты (при комплектовании блоком сухих контактов);
- защита от несанкционированного доступа;
- разграничение прав с использованием ролей.
Параметры
| Количество зон обнаружения | от 1 до 8 |
| Различаемые классы ТС | легковой, грузовой |
| Рабочая температура окружающей среды, С | от -40 до +50 |
| Напряжение питания, В | ~230 +/- 10% |
| Максимальная потребляемая мощность с обогревателем, Вт | 50 |
| Максимальная потребляемая мощность без обогревателя, Вт | 20 |
Конструкция
ВД включает в себя видеокамеру с варифокальным объективом и вычислительный модуль, заключенные в единый корпус, располагаемый на опоре над потоком транспорта.
ВД также содержит устройство защиты интерфейса связи от перенапряжений, блок питания и блок автоматического обогрева.
Интерфейс и особенности
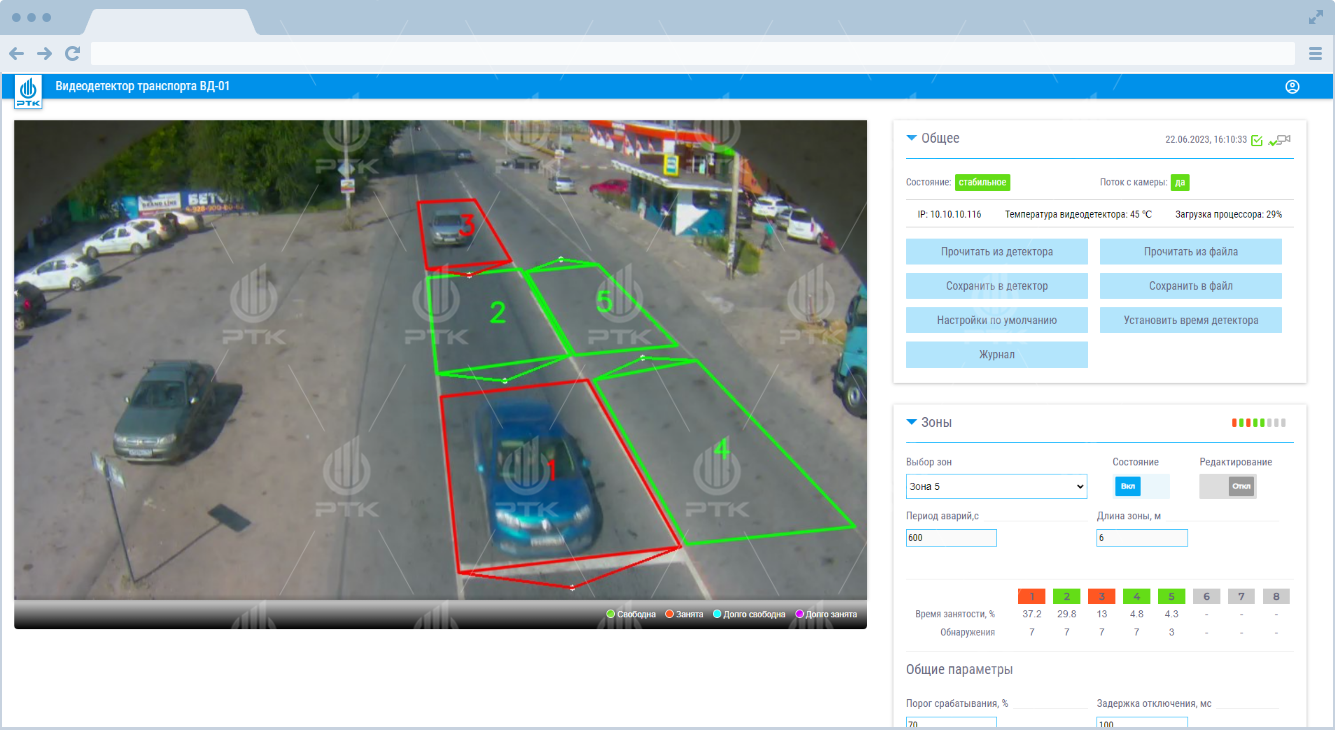
Визуальное наблюдение за работой детектора и его настройка осуществляется посредством веб-интерфейса.
Страница веб-интерфейса состоит из виджетов. В левой части расположен виджет визуализации работы детектора. На видеоизображении, получаемом с камеры, четырехугольниками отображаются зоны детектирования с цифрами, означающими их номера.
Цвет зоны означает ее состояние, например, красный – занята, зеленый — свободна.
Внизу приведена легенда по цветам. При работе детектора цвета зон меняются в реальном масштабе времени. Расположение зон может быть изменено пользователем в интерактивном режиме непосредственно на видеоизображении.
Справа вверху расположен виджет «Общее» в котором отображаются некоторые параметры работы детектора: IP адрес, наличие видеопотока, время детектора, температура.
Здесь же расположены кнопки работы с настройками детектора, позволяющие:
- сохранять настройки детектора в файл и читать из файла;
- сохранять настройки, созданные на веб интерфейсе в детектор, читать настройки из
детектора в веб интерфейс; - устанавливать настройки по умолчанию;
- вызывать страницу журналов.
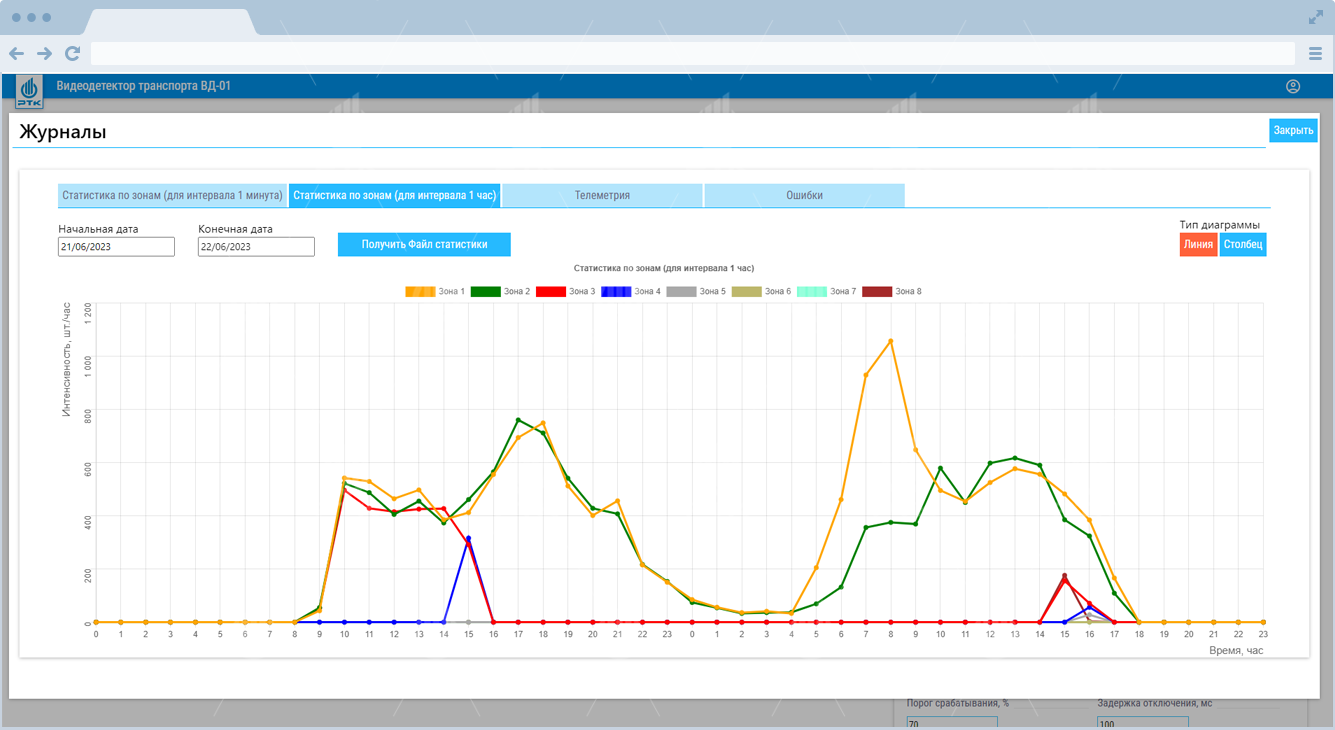
Страница журналов позволяет получать статистику по зонам по минутам и часам, визуально на диаграмме наблюдать интенсивность движения за выбранный интервал времени, читать журналы телеметрии и ошибок.
Ниже находится виджет «Зоны», позволяющий:
- наблюдать состояние зон и статистические параметры детектирования: время занятости и количество обнаружений за заданный момент времени;
- включать и отключать зоны, выбирать тип зоны, настраивать параметры.
Ключевой особенностью ВД является нейросетевой алгоритм обнаружения и вычисления геометрического центра ТС.
Алгоритм позволяет с высокой достоверностью определять наличие ТС в определенных зонах даже в сложных случаях, когда ТС проходящие, через ближнюю к детектору зону, частично перекрывают видимость удаленных зон.
При этом количество ложных срабатываний, в том числе связанных с ошибочным определением фактического расположения ТС относительно зон, стремится к нулю.
Протокол связи
Протокол связи на интерфейсе Ethernet позволяет получить для каждой из зон:
- признак наличия хотя бы одного ТС в зоне в текущий момент времени;
- признак наличия хотя бы одного стоящего (неподвижного более 6с) ТС в зоне;
- информацию об ошибках зоны (состояние зоны не меняется более заданного времени);
- количество ТС определенного класса, прошедших через зону за произвольный интервал
времени; - среднюю скорость ТС, прошедших через зону за произвольный интервал времени.